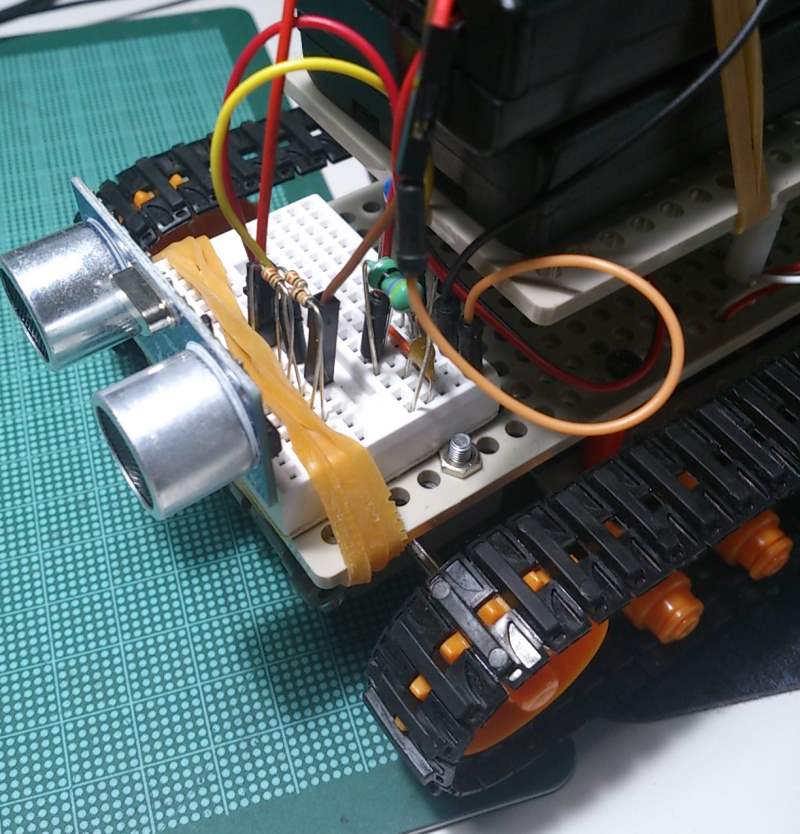
マイクロブレッドボードに、HT7750A使用の5V昇圧回路とレンジセンサからの5V信号を3.3Vに落とす分圧抵抗を設置して、テスト。
まぁ、なんというか、まっすぐ走らなくて曲がってしまうがな。左のモータの方が速い様です。これは方位センサを用いてモータのPWM値をリアルタイム調整する事で何とかしたいと思います。
レンジセンサも意外と間違いデータが発生するので、n回の値を取らないと旨く止まりませんでした。レンジセンサも障害物との距離が遠いと1回の測定に時間がかかる。超音波っても音だからか。近いとエコーがすぐ帰ってくるので速い。
実際に作って動かしてみると色々と改良ネタが出てきますね。