本日は、ハードウエアではなくソフトウエアを作成。
インセクトの時のリモコンをベースに、コマンドデータを送信するようにした。
2byteのコマンド。1byte目は下位4bit利用で左右のモータのON/OFF。モータードライバを介しているので、一つのモータに対して正転と逆転を同時にONに指定することができる。機能的にはブレーキの扱い。ただ、キャタピラ車なのでブレーキにあまり意味は無い。2byte目はモータの回転速度を制御するPWMの0-255の値。ただ255段階も細かくする必要もないので、16段階にして、モータ制御のコマンドと合わせて1byteにしようと思っている。ビットにしたほうが、ビット演算とシフト演算で短くコードを書けるので楽だね。
で、モータ制御の操作スイッチに変化がない間は、方位センサーの値を要求するコマンドを送っている。
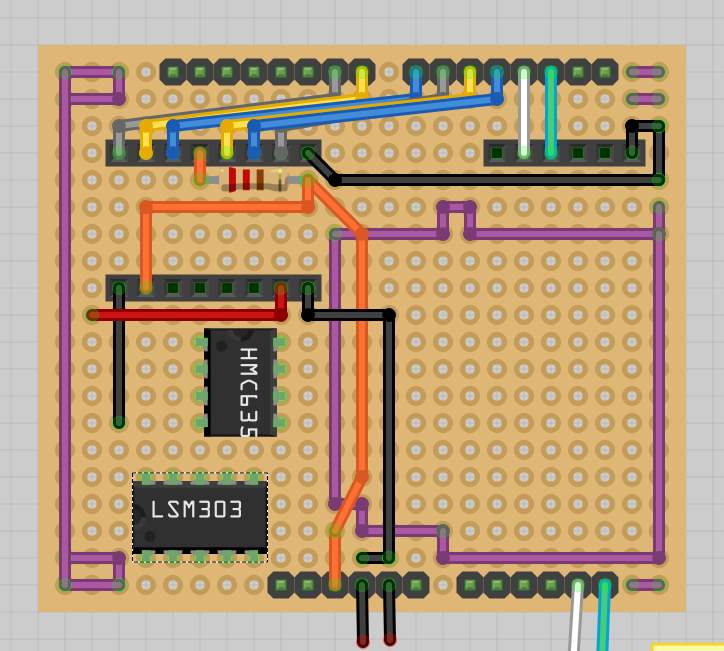
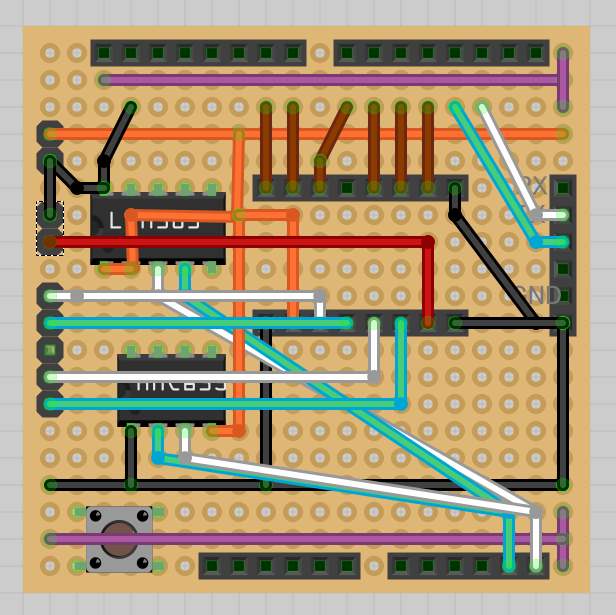
つづいてクロウラー側。まだ、二階部分の基板は作ってないので、ブレッドボード上でテスト。。
モータ制御コマンドを受け取ったらそれに対応。
方位センサーの値の要求コマンドを受け取ったらそれに対応。
なんのことはなく完成。
ソフト部分ができてきたので、明日はハンダ付けの日かな?