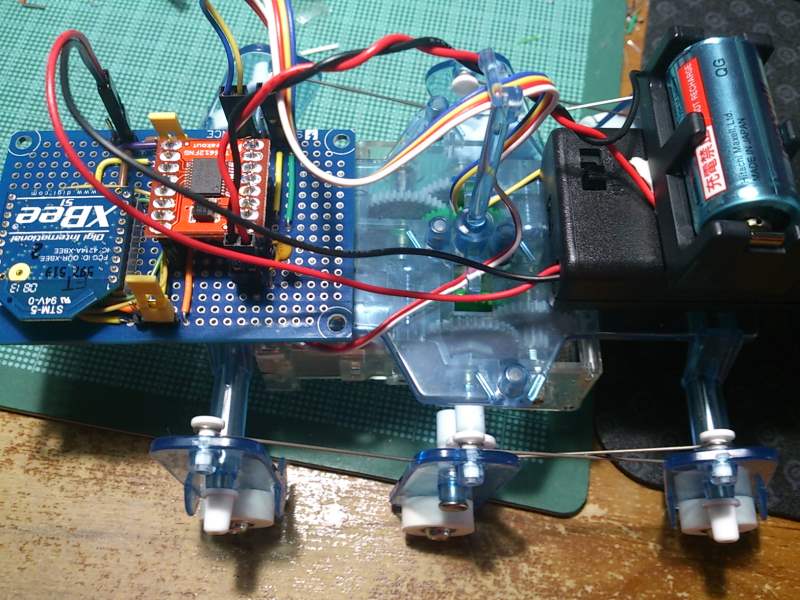
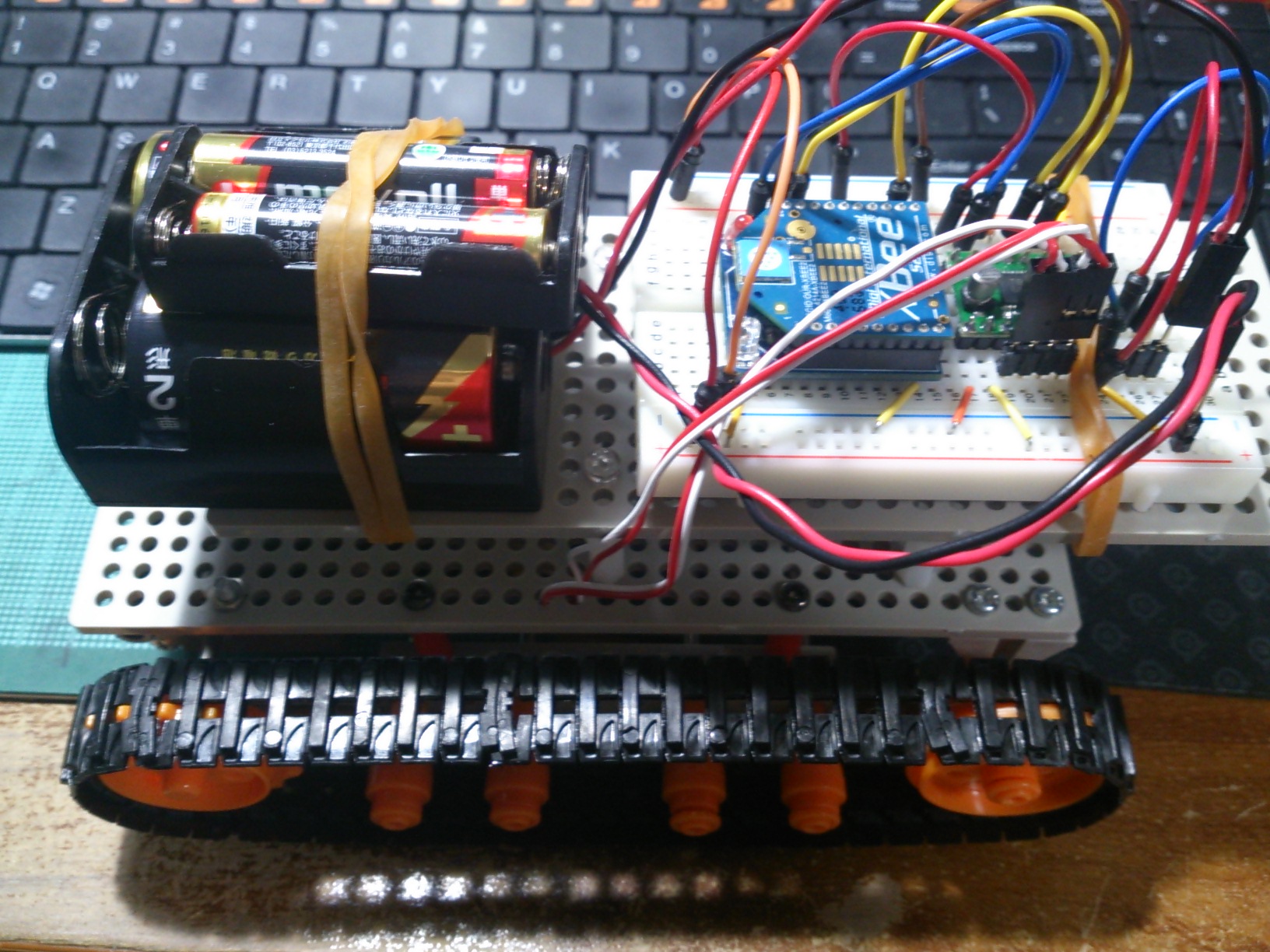
無限軌道のクロウラー。ホントは上にものをつかむギミックが乗るののだけど、そこは省いた形。
今夜は2階建てにして、XBee、モータドライバと電池を載せて遊んでみた。動画は無し。
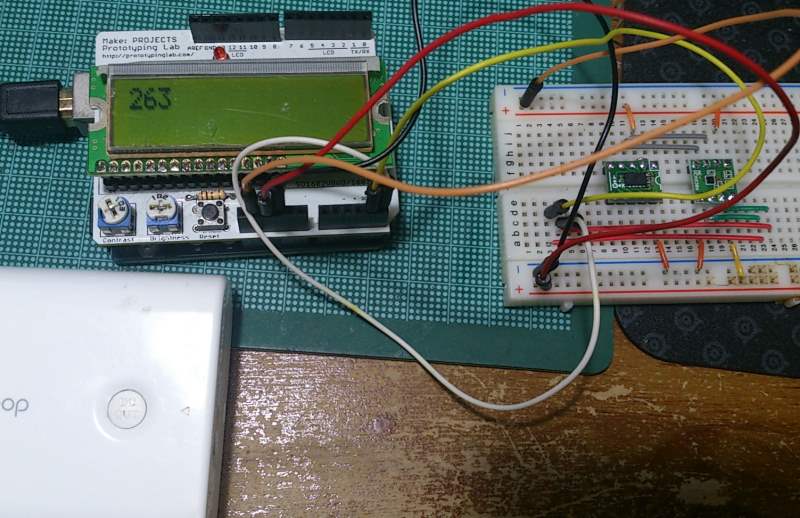
この週末お休みで、XBeeとモータドライバの間にATmega328Pを挟んだ感じでコマンドコントロール系に変更します。ついでに、加速度・地磁気センサの値を受信してログ保管。
XBee&ATmega328Pは2011年12月のMake: Tokyo Meeting 07で仕入れてきたアルシオーノを組み立てて使ってみます。せっかく買ったので使わないと。制御系の電源は3.3Vで行くのでクリスタルは手持ちの8MHzに取り替えます。距離センサは手持ちに3.3V対応のVCNL4000が1つだけあるので搭載してみようかな。という感じです。
コンデンサマイクを複数置いて、”手を叩いた方向へ進む”とかもやってみたいです。
他は、多分自宅のリビングでは走行不可能な、ボールキャスターとタイヤ2つによるメカも仕入れました。でも、やはりキリムの床では進まないかも知れない。