サンプルソースをちゃんと読んだら、ちゃんと書いてあるじゃん。
// Calibration values. Use the Calibrate example program to get the values for
// your compass.
compass.m_min.x = -364; compass.m_min.y = -291; compass.m_min.z = -336;
compass.m_max.x = +265; compass.m_max.y = +345; compass.m_max.z = 180;
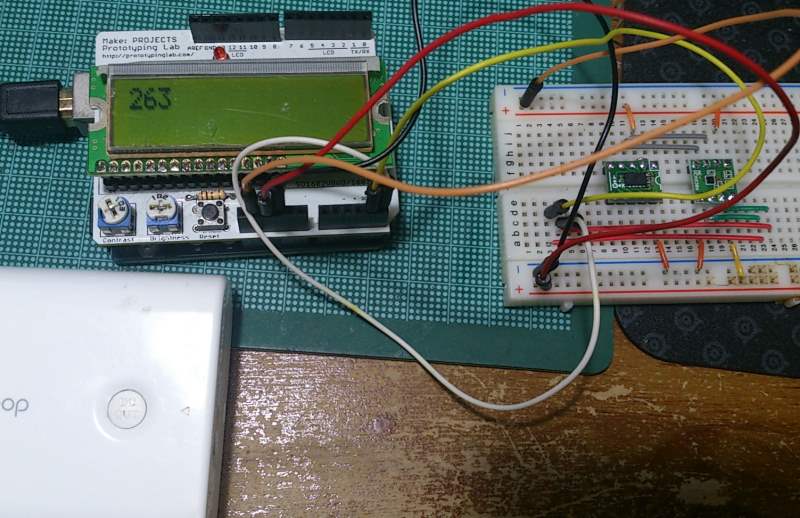
X,Y,Z軸のMAXとMINの値を表示させるスケッチをつかって、自分のLSM303DLHCの計測値の範囲を取得。ブレッドボード接続のままぐるんぐるん・くねんくねんとセンサーを手で動かすのは難しい。
昨日作った360度方位をLCDに表示するスケッチに書き換えて、正常動作を確認できました。
実は、二軸方位センサHMC6352も手に入れていて、こいつもやはりキャリブレーションがいる。こっちはセンサーをキャリブレーションモードにしてぐるぐる回せばOKみたい。二軸なのでくねんくねんは要らないw。で、この値がセンサ内に保存されるのかどうか?調べておこう。じゃないと毎回ぐるぐるしなくては。