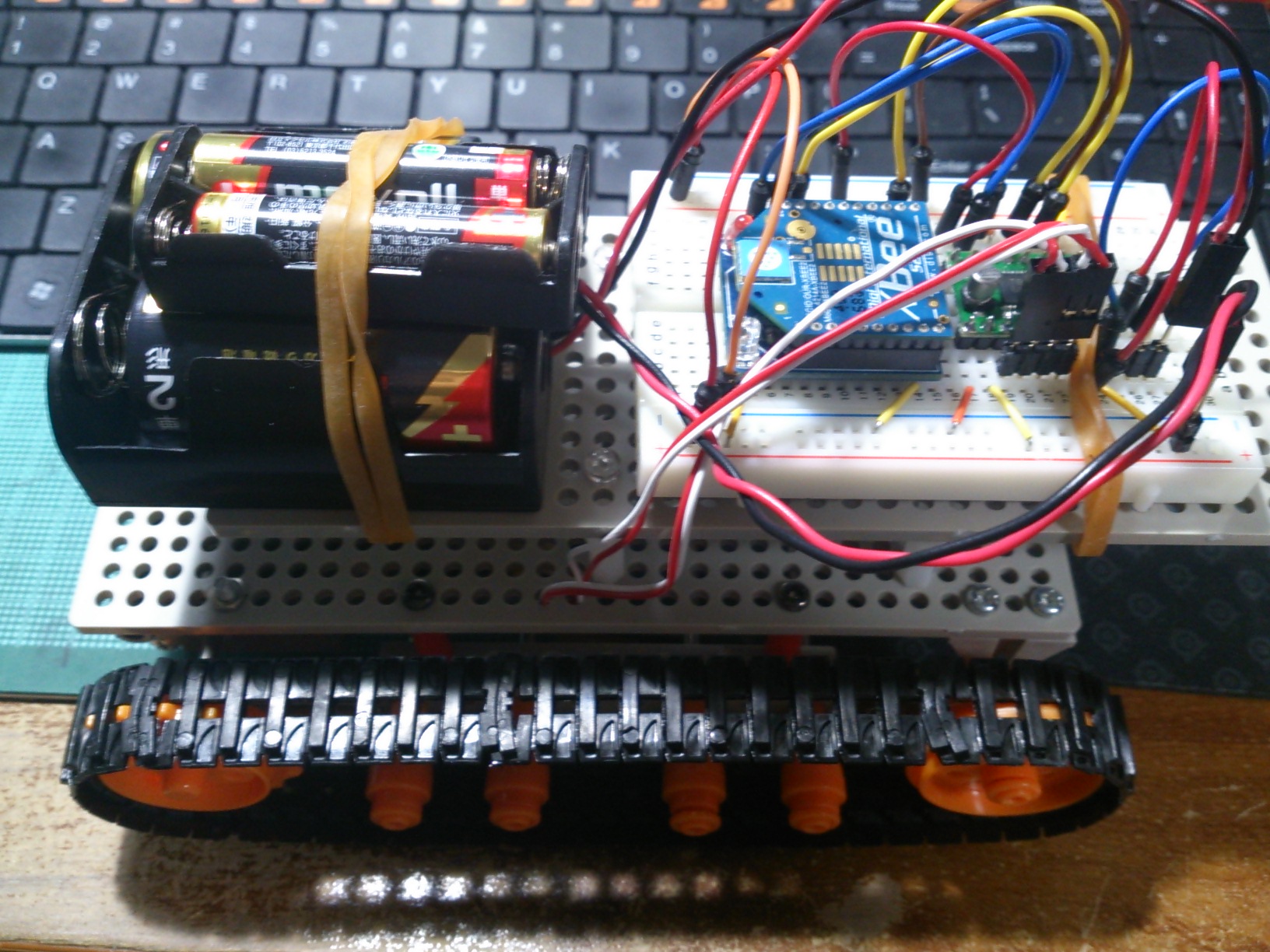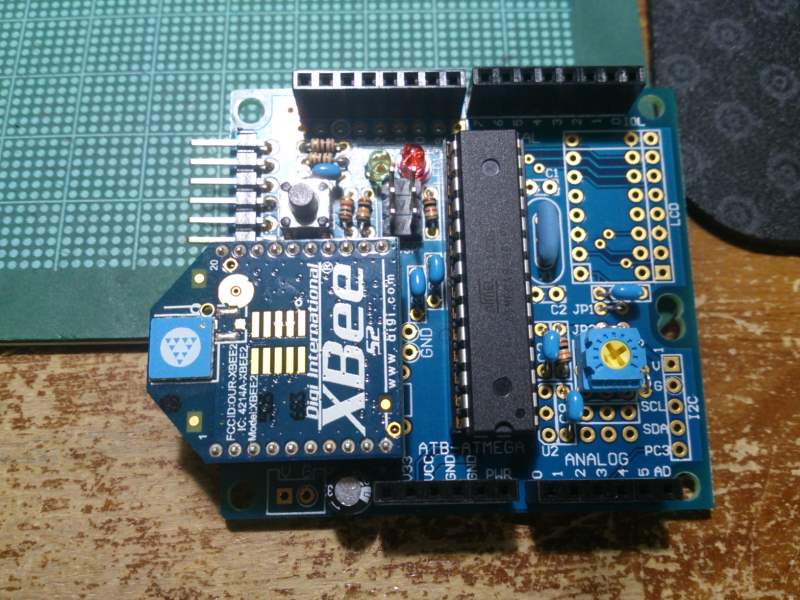
予定通りエキサードラボさんのアルシオーノを作成。プリント基板なのでさくさくと進む。LCDは使わないのでその部分は端折る。
今回、電源は規定の5Vでなく3.3Vに変更。マイコンはATmega328Pのままだけど、3.3Vなのでクロックは16MHzから8MHzへ変更。16MHzのセラロックは使わずに、手持ちの8MHzのセラロックを半田づけ。
XBeeのソケットもそれをはんだづけする部分もあるのでこれも半田付。しかし、そこからつながってるのはGNDだけ。XBeeの電源、DOUT、DINは孤立のランドがあるのみ。
この段階で、ATmega328PのArduinoブートローダを書き換え。ISP端子があるんでAVRISPmk2にてATmegaBOOT_168_atmega328_pro_8MHz.hexを書き込み。その後シリアルでのプログラム転送もOK。
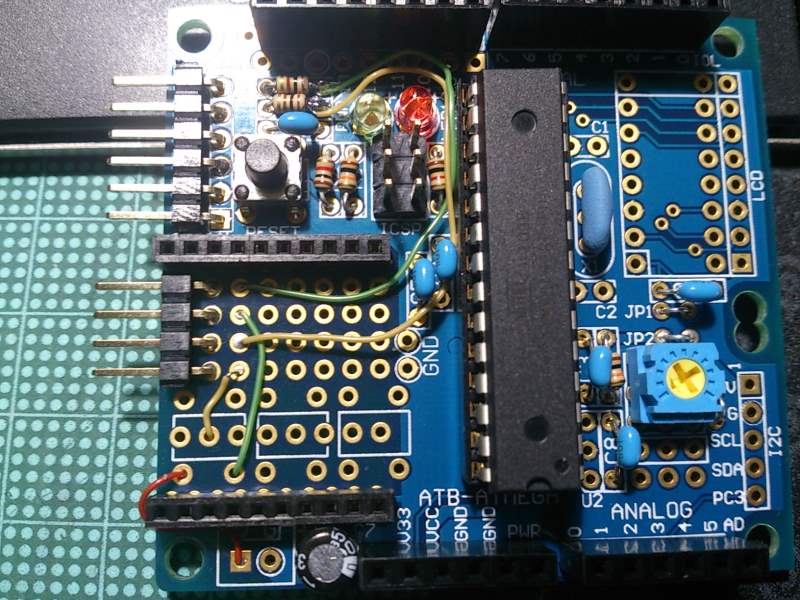
XBee周りは配線で対応。3.3V電源にしたので、アルシオーノに付属の5V→3.3V降圧用のダイオードは使わず。XBeeを抜かずにAVRのハードシリアルから切り離す仕組みとして、ジャンパピンをTX,RXにつけました。ISPでHEX書き込むなら別に無くても良いのだけども、シリアル書き込みもするかなと。
で、ソフトウエアの変更。
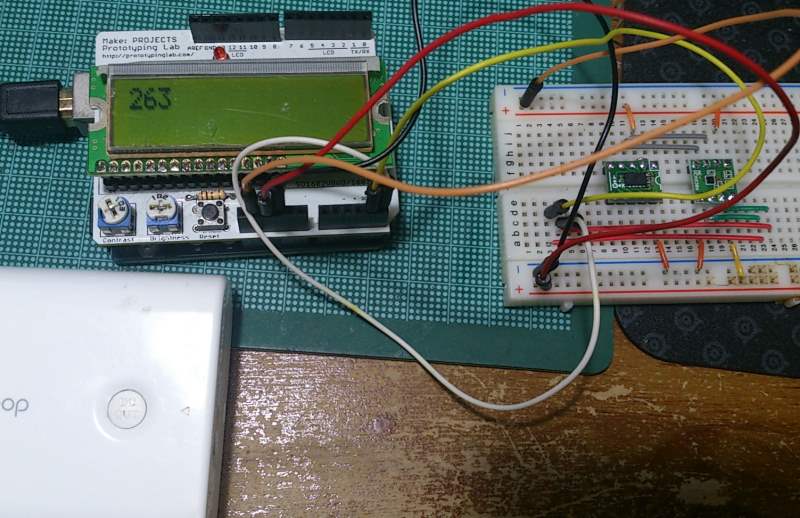
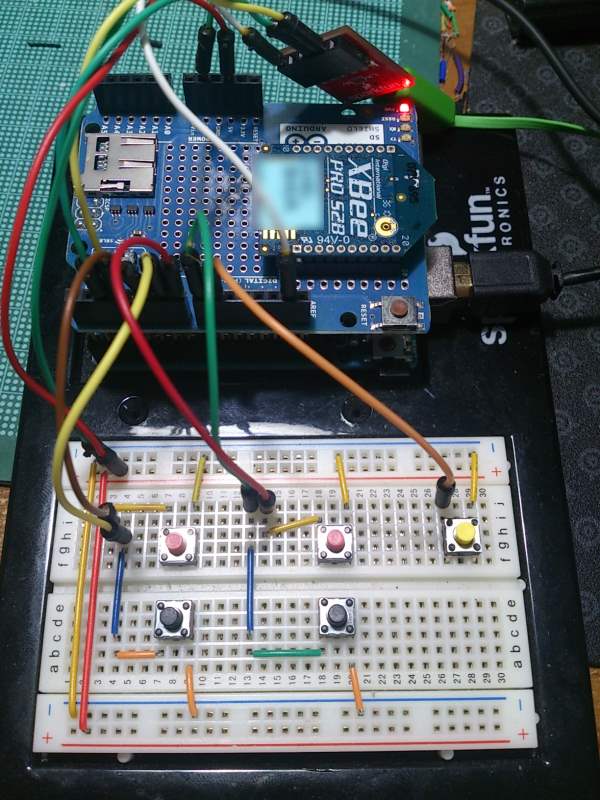
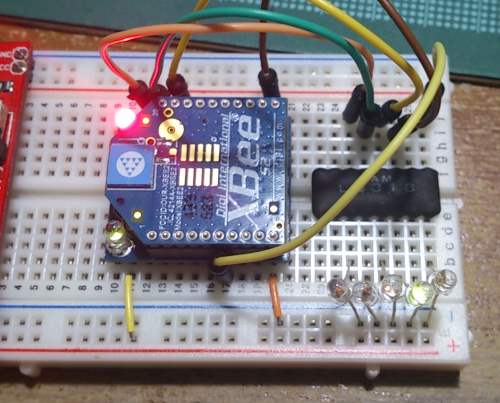
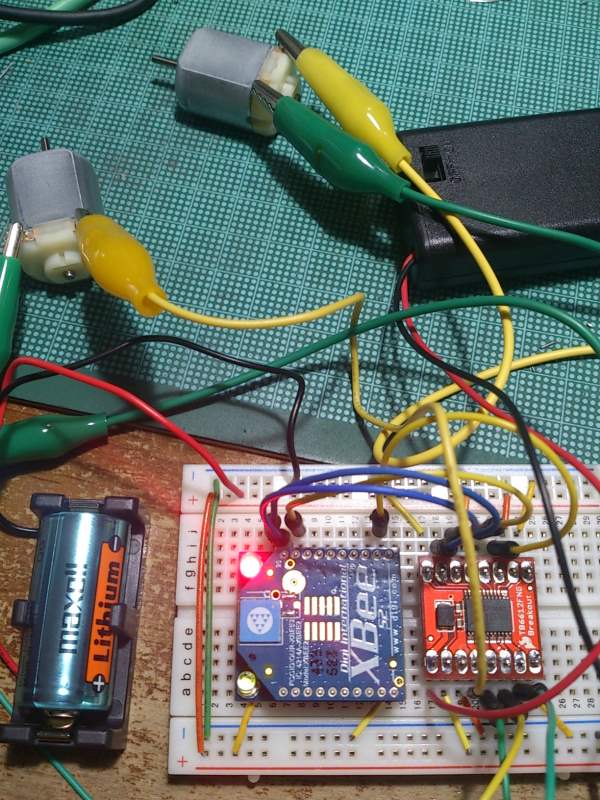
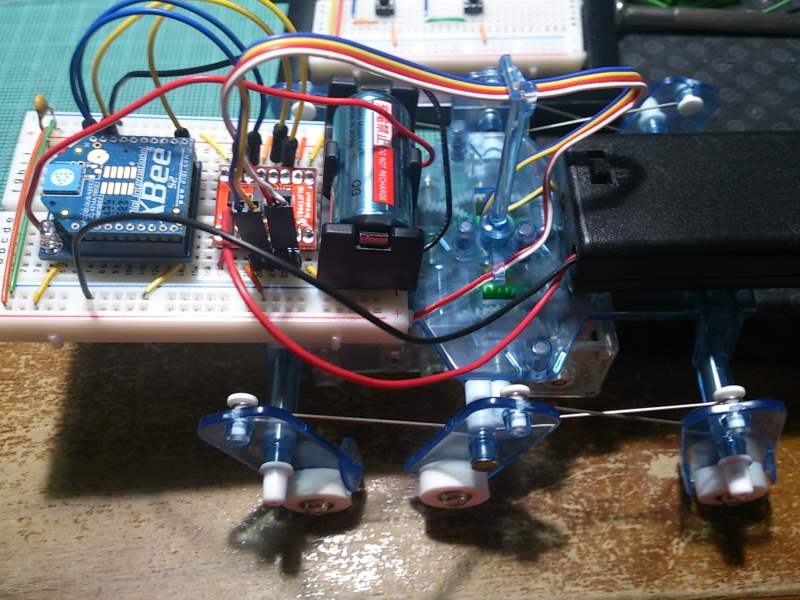
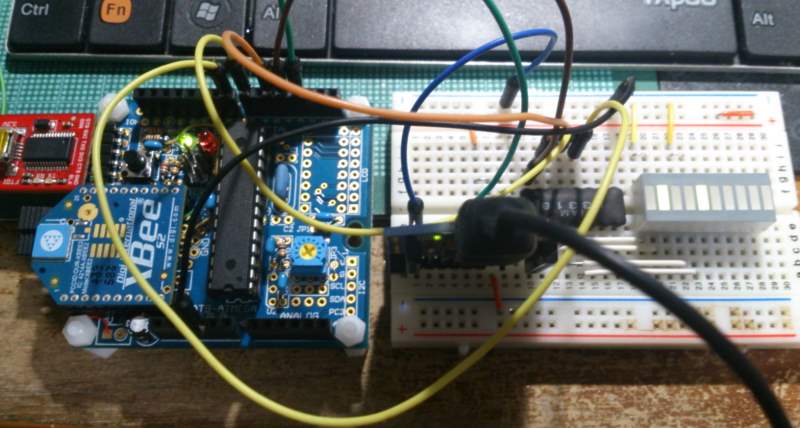
リモコン側と、今回作った操作される側の2つが揃っていないのでArduinoIDEで環境を切り替えるのが面倒です。モータードライバ&モータを繋ぐと五月蝿いので、LEDで動作確認中。
この週末はソフトの作成までかな。日曜に趣味を頑張ってしまうと、月曜からの仕事へ脳みそが変換出来ない。
あとアルシオーノの販売元のエキサードラボさんのHPがなくなっていた事に1年半の時間を感じる。