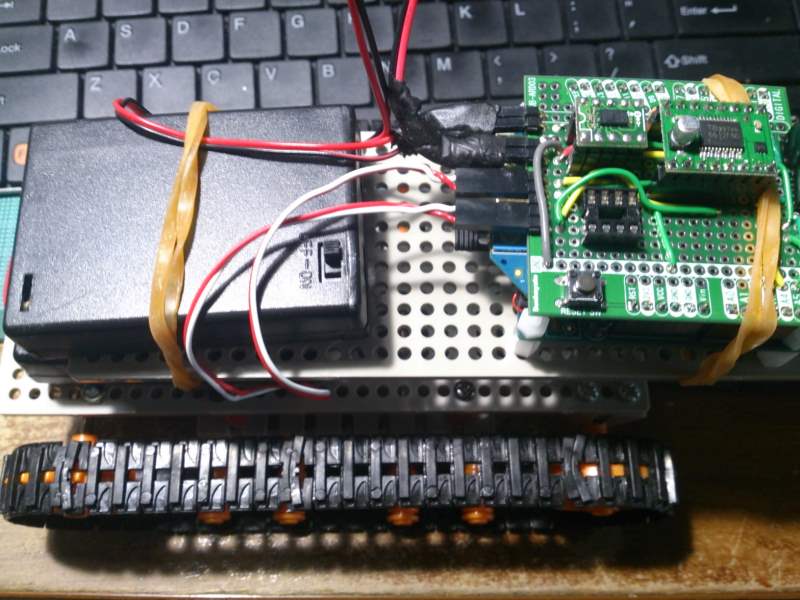
午前中でアルシオーノの二階部分を作成完了。無事に動作するかと思ったら、プログラムと実基板のピンが合っていない部分があってソフトウエアにてピン修正して完了。開いてるソケットは2軸コンパスを使う時用。
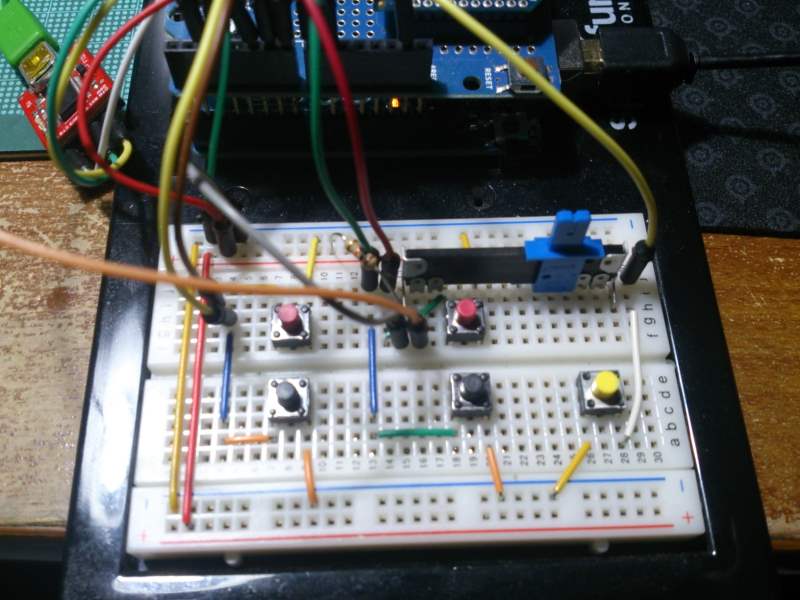
その後リモコンの改良。秋月からスライド抵抗を買ったので、これでモータの回転を可変にする為のPWM値のベースとした。でも、マブチのFA130ブラシモータだからか、知識が無くてよくわからないのだけど、細かい速度調整は達成出来なかった。リニアには行かないようです。微調整してみようかな。秋月で売ってる日本電産コパル株式会社のステッピングモータも手に入れたので、いつかステッピングモータードライブのおもちゃも良いかと思う。
リモコンに付いている黄色いボタンはユーザ操作モードと自律モードの切替に使う予定。

で、自律行動の基本として、前方に障害物があったらバックしつつ回転して新たな方向へ向かうプログラミングでもしようと。近接センサーとしてVCNL4000を持ってますが、もともとノートパソコンの蓋が開いてるかどうかのセンサなんで距離的に微妙。手持ちのシャープのGP2Y0A21YKという10cm~80cmが測距できるセンサ(上記画像)を利用しようかと。こいつ電源が5Vなんですよね。昇圧電池ボックスを使うかね。試してみたら一応3.3Vでもなんか動いてはいましたけどね。距離が急変した時に値が激しく変わる現象はあるようです。
「カメラで状況を解析して」なんて事はしたくないので、距離センサや明るさセンサで状況を解析しつつ移動する感じに仕上げたい。お助けとして赤外線LEDで灯台を作るのも良いかもね。
まぁ、色々試していけば良いかなと。ロボコンに出るわけでもないので自律行動に目的はない。逆に操作モードで動かしてると楽しいので、アーム類のギミックを搭載するほうが良いのかも。